Hello,
I am having trouble to get the solution of incompressible Navier-Stokes DFG benchmark 2D-2 (RE100, periodic) - Featflow (tu-dortmund.de) for different time steps.
I edit the code in the Dokken’s FEniCSx tutorial for the flow past a cylinder (Test problem 2: Flow past a cylinder (DFG 2D-3 benchmark) — FEniCSx tutorial ), but did not get the desire result.
the complete code is:
import gmsh
import os
import numpy as np
import matplotlib.pyplot as plt
import tqdm.autonotebook
import matplotlib as mpl
from mpi4py import MPI
from petsc4py import PETSc
from dolfinx.cpp.mesh import to_type, cell_entity_type
from dolfinx.fem import (Constant, Function, FunctionSpace,
assemble_scalar, dirichletbc, form, locate_dofs_topological, set_bc)
from dolfinx.fem.petsc import (apply_lifting, assemble_matrix, assemble_vector,
create_vector, create_matrix, set_bc)
from dolfinx.graph import adjacencylist
from dolfinx.geometry import bb_tree, compute_collisions_points, compute_colliding_cells
from dolfinx.io import (VTXWriter, distribute_entity_data, gmshio)
from dolfinx.mesh import create_mesh, meshtags_from_entities
from dolfinx import plot
from ufl import (FacetNormal, FiniteElement, Identity, Measure, TestFunction, TrialFunction, VectorElement,
as_vector, div, dot, ds, dx, inner, lhs, grad, nabla_grad, rhs, sym)
import dolfinx
import viskex
import matplotlib.tri as tri
mesh_comm = MPI.COMM_WORLD
############################################
#--------------- Mesh creation ------------#
############################################
model_rank = 0
gmsh.initialize()
L = 2.2
H = 0.41
c_x = c_y = 0.2
r = 0.05
gdim = 2
## Creation of the geometry entities (a cylinder within a rectangle)
if mesh_comm.rank == model_rank:
rectangle = gmsh.model.occ.addRectangle(0, 0, 0, L, H, tag=1)
obstacle = gmsh.model.occ.addDisk(c_x, c_y, 0, r, r)
## The next step is to substract the obstacle from the channel, such that we do not mesh the interior of the circle
if mesh_comm.rank == model_rank:
fluid = gmsh.model.occ.cut([(gdim, rectangle)], [(gdim, obstacle)])
gmsh.model.occ.synchronize()
## To get GMSH to mesh the fluid, we add a physical volume marker
fluid_marker = 1
if mesh_comm.rank == model_rank:
volumes = gmsh.model.getEntities(dim=gdim)
assert (len(volumes) == 1)
gmsh.model.addPhysicalGroup(volumes[0][0], [volumes[0][1]], fluid_marker)
gmsh.model.setPhysicalName(volumes[0][0], fluid_marker, "Fluid")
## To get GMSH to mesh the fluid, we add a physical volume marker
fluid_marker = 1
if mesh_comm.rank == model_rank:
volumes = gmsh.model.getEntities(dim=gdim)
assert (len(volumes) == 1)
gmsh.model.addPhysicalGroup(volumes[0][0], [volumes[0][1]], fluid_marker)
gmsh.model.setPhysicalName(volumes[0][0], fluid_marker, "Fluid")
# variable mesh sizes to resolve the flow solution in the area of interest; close to the circular obstacle
# Create distance field from obstacle.
# Add threshold of mesh sizes based on the distance field
# LcMax - /--------
# /
# LcMin -o---------/
# | | |
# Point DistMin DistMax
res_min = r / 3
if mesh_comm.rank == model_rank:
distance_field = gmsh.model.mesh.field.add("Distance")
gmsh.model.mesh.field.setNumbers(distance_field, "EdgesList", obstacle)
threshold_field = gmsh.model.mesh.field.add("Threshold")
gmsh.model.mesh.field.setNumber(threshold_field, "IField", distance_field)
gmsh.model.mesh.field.setNumber(threshold_field, "LcMin", res_min)
gmsh.model.mesh.field.setNumber(threshold_field, "LcMax", 0.25 * H)
gmsh.model.mesh.field.setNumber(threshold_field, "DistMin", r)
gmsh.model.mesh.field.setNumber(threshold_field, "DistMax", 2 * H)
min_field = gmsh.model.mesh.field.add("Min")
gmsh.model.mesh.field.setNumbers(min_field, "FieldsList", [threshold_field])
gmsh.model.mesh.field.setAsBackgroundMesh(min_field)
### GENERATING THE MESH
## We are now ready to generate the mesh. However, we have to decide if our mesh should
## consist of triangles or quadrilaterals. Here we use second order quadrilateral elements.
if mesh_comm.rank == model_rank:
gmsh.option.setNumber("Mesh.Algorithm", 8)
gmsh.option.setNumber("Mesh.RecombinationAlgorithm", 2)
gmsh.option.setNumber("Mesh.RecombineAll", 1)
gmsh.option.setNumber("Mesh.SubdivisionAlgorithm", 1)
gmsh.model.mesh.generate(gdim)
gmsh.model.mesh.setOrder(2)
gmsh.model.mesh.optimize("Netgen")
#=============== Loading mesh and boundary markers============================
## As we have generated the mesh, we now need to load the mesh and corresponding
## facet markers into DOLFINx.
mesh, c, ft = gmshio.model_to_mesh(gmsh.model, mesh_comm, model_rank, gdim=gdim)
mesh.name = "Cylinder"
c.name = "Cell markers"
ft.name = "Facet markers"
# gmsh.finalize()
# mesh.topology.create_connectivity(mesh.topology.dim - 1, mesh.topology.dim)
# Physical and discretization parameters
t = 0
T = 8 # Final time
dt =1 / 5 # Time step size
num_steps =int(T / dt)
k = Constant(mesh, PETSc.ScalarType(dt))
mu = Constant(mesh, PETSc.ScalarType(0.001)) # Dynamic viscosity
rho = Constant(mesh, PETSc.ScalarType(1)) # Density
#=================== Boundary conditions===========================
v_cg2 = VectorElement("Lagrange", mesh.ufl_cell(), 2)
s_cg1 = FiniteElement("Lagrange", mesh.ufl_cell(), 1)
V = FunctionSpace(mesh, v_cg2)
Q = FunctionSpace(mesh, s_cg1)
fdim = mesh.topology.dim - 1
# Define boundary conditions
U_0 = 0.3 # longitunal/lenghtwise velocity at coordinate (x,y)=(0,H/2)
# class InletVelocity():
# def __init__(self, t):
# self.t = t
# def __call__(self, x):
# values = np.zeros((gdim, x.shape[1]), dtype=PETSc.ScalarType)
# # Umax=1.5
# # values[0] = 4 * 1.5 * np.sin(self.t * np.pi / 8) * x[1] * (0.41 - x[1]) / (0.41**2)
# values[0] = 4 * 1.5 * x[1] * (H - x[1]) / (H**2)
# # values[0, :] = 0.3
# return values
def u_in_eval(x: np.typing.NDArray[np.float64]) -> np.typing.NDArray[ # type: ignore[no-any-unimported]
PETSc.ScalarType]:
"""Return the flat velocity profile at the inlet."""
values = np.zeros((2, x.shape[1]))
values[0] = 4 * U_0 * x[1] * (H - x[1])/(H**2)
# values[0, :] = 1.5
return values
# Inlet
u_inlet = Function(V)
# inlet_velocity = InletVelocity(t)
u_inlet.interpolate(u_in_eval)
bcu_inflow = dirichletbc(u_inlet, locate_dofs_topological(V, fdim, ft.find(inlet_marker)))
# Walls
u_nonslip = np.array((0,) * mesh.geometry.dim, dtype=PETSc.ScalarType)
bcu_walls = dirichletbc(u_nonslip, locate_dofs_topological(V, fdim, ft.find(wall_marker)), V)
# Obstacle
bcu_obstacle = dirichletbc(u_nonslip, locate_dofs_topological(V, fdim, ft.find(obstacle_marker)), V)
bcu = [bcu_inflow, bcu_obstacle, bcu_walls]
# Outlet
bcp_outlet = dirichletbc(PETSc.ScalarType(0), locate_dofs_topological(Q, fdim, ft.find(outlet_marker)), Q)
bcp = [bcp_outlet]
#============== Variational form============================
u = TrialFunction(V)
v = TestFunction(V)
u_ = Function(V)
u_.name = "u"
u_s = Function(V)
u_n = Function(V) #uold
u_n1 = Function(V)
p = TrialFunction(Q)
q = TestFunction(Q)
p_ = Function(Q)
p_.name = "p"
phi = Function(Q)
# variational formulation for the first step
f = Constant(mesh, PETSc.ScalarType((0, 0)))
F1 = rho / k * dot(u - u_n, v) * dx
F1 += inner(dot(1.5 * u_n - 0.5 * u_n1, 0.5 * nabla_grad(u + u_n)), v) * dx
F1 += 0.5 * mu * inner(grad(u + u_n), grad(v)) * dx - dot(p_, div(v)) * dx
F1 += dot(f, v) * dx
a1 = form(lhs(F1))
L1 = form(rhs(F1))
A1 = create_matrix(a1)
b1 = create_vector(L1)
# the second step
a2 = form(dot(grad(p), grad(q)) * dx)
L2 = form(-rho / k * dot(div(u_s), q) * dx)
A2 = assemble_matrix(a2, bcs=bcp)
A2.assemble()
b2 = create_vector(L2)
# create the last step
a3 = form(rho * dot(u, v) * dx)
L3 = form(rho * dot(u_s, v) * dx - k * dot(nabla_grad(phi), v) * dx)
A3 = assemble_matrix(a3)
A3.assemble()
b3 = create_vector(L3)
# Solver for step 1
solver1 = PETSc.KSP().create(mesh.comm)
solver1.setOperators(A1)
solver1.setType(PETSc.KSP.Type.BCGS)
pc1 = solver1.getPC()
pc1.setType(PETSc.PC.Type.JACOBI)
# Solver for step 2
solver2 = PETSc.KSP().create(mesh.comm)
solver2.setOperators(A2)
solver2.setType(PETSc.KSP.Type.MINRES)
pc2 = solver2.getPC()
pc2.setType(PETSc.PC.Type.HYPRE)
pc2.setHYPREType("boomeramg")
# Solver for step 3
solver3 = PETSc.KSP().create(mesh.comm)
solver3.setOperators(A3)
solver3.setType(PETSc.KSP.Type.CG)
pc3 = solver3.getPC()
pc3.setType(PETSc.PC.Type.SOR)
#============ Verification of the implementation compute known physical quantities==============
n = -FacetNormal(mesh) # Normal pointing out of obstacle
dObs = Measure("ds", domain=mesh, subdomain_data=ft, subdomain_id=obstacle_marker)
u_t = inner(as_vector((n[1], -n[0])), u_)
drag = form(2 / 0.1 * (mu / rho * inner(grad(u_t), n) * n[1] - p_ * n[0]) * dObs)
lift = form(-2 / 0.1 * (mu / rho * inner(grad(u_t), n) * n[0] + p_ * n[1]) * dObs)
if mesh.comm.rank == 0:
C_D = np.zeros(num_steps, dtype=PETSc.ScalarType)
C_L = np.zeros(num_steps, dtype=PETSc.ScalarType)
t_u = np.zeros(num_steps, dtype=np.float64)
t_p = np.zeros(num_steps, dtype=np.float64)
tree = bb_tree(mesh, mesh.geometry.dim)
points = np.array([[0.15, 0.2, 0], [0.25, 0.2, 0]])
cell_candidates = compute_collisions_points(tree, points)
colliding_cells = compute_colliding_cells(mesh, cell_candidates, points)
front_cells = colliding_cells.links(0)
back_cells = colliding_cells.links(1)
if mesh.comm.rank == 0:
p_diff = np.zeros(num_steps, dtype=PETSc.ScalarType)
from dolfinx import geometry
pointsd = mesh.geometry.x
cells = []
points_on_proc = []
# Find cells whose bounding-box collide with the the points
cell_candidatesd = compute_collisions_points(tree, pointsd)
# Choose one of the cells that contains the point
colliding_cellsd = compute_colliding_cells(mesh, cell_candidatesd, pointsd)
for i, point in enumerate(pointsd):
if len(colliding_cellsd.links(i)) > 0:
points_on_proc.append(point)
cells.append(colliding_cellsd.links(i)[0])
points_on_proc = np.array(points_on_proc, dtype=np.float64)
u_values =np.zeros((num_steps,points_on_proc.shape[0]))
v_values = np.zeros((num_steps,points_on_proc.shape[0]))
p_values = np.zeros((num_steps,points_on_proc.shape[0]))
times = np.zeros((num_steps,1))
# V0, dofs = V.sub(0).collapse()
# coords = V0.tabulate_dof_coordinates()[:, 0:2]#coords
# sort_coords = np.argsort(coords)
# Solving the time-dependent problem
from pathlib import Path
folder = Path("results")
folder.mkdir(exist_ok=True, parents=True)
vtx_u = VTXWriter(mesh.comm, "dfg2D-3-u.bp", [u_], engine="BP4")
vtx_p = VTXWriter(mesh.comm, "dfg2D-3-p.bp", [p_], engine="BP4")
vtx_u.write(t)
vtx_p.write(t)
progress = tqdm.autonotebook.tqdm(desc="Solving PDE", total=num_steps)
for i in range(num_steps):
progress.update(1)
# Update current time step
t += dt
# Update inlet velocity
# inlet_velocity.t = t
# u_inlet.interpolate(inlet_velocity)
# Step 1: Tentative velocity step
A1.zeroEntries()
assemble_matrix(A1, a1, bcs=bcu)
A1.assemble()
with b1.localForm() as loc:
loc.set(0)
assemble_vector(b1, L1)
apply_lifting(b1, [a1], [bcu])
b1.ghostUpdate(addv=PETSc.InsertMode.ADD_VALUES, mode=PETSc.ScatterMode.REVERSE)
set_bc(b1, bcu)
solver1.solve(b1, u_s.vector)
u_s.x.scatter_forward()
# Step 2: Pressure corrrection step
with b2.localForm() as loc:
loc.set(0)
assemble_vector(b2, L2)
apply_lifting(b2, [a2], [bcp])
b2.ghostUpdate(addv=PETSc.InsertMode.ADD_VALUES, mode=PETSc.ScatterMode.REVERSE)
set_bc(b2, bcp)
solver2.solve(b2, phi.vector)
phi.x.scatter_forward()
p_.vector.axpy(1, phi.vector)
p_.x.scatter_forward()
# Step 3: Velocity correction step
with b3.localForm() as loc:
loc.set(0)
assemble_vector(b3, L3)
b3.ghostUpdate(addv=PETSc.InsertMode.ADD_VALUES, mode=PETSc.ScatterMode.REVERSE)
solver3.solve(b3, u_.vector)
u_.x.scatter_forward()
# Write solutions to file
vtx_u.write(t)
vtx_p.write(t)
times[i,0]=t
# valuesU.append(u_.x.array[dofs][sort_coords])
# valuesP.append(p_.x.array[dofs][sort_coords])
uval=u_.eval(points_on_proc, cells)
pval=p_.eval(points_on_proc, cells)
u_values[i,:]= uval[:,0]
v_values[i,:]=uval[:,1]
p_values[i,:] = pval[:,0]
# Update variable with solution form this time step
with u_.vector.localForm() as loc_, u_n.vector.localForm() as loc_n, u_n1.vector.localForm() as loc_n1:
loc_n.copy(loc_n1)
loc_.copy(loc_n)
# Compute physical quantities
# For this to work in paralell, we gather contributions from all processors
# to processor zero and sum the contributions.
drag_coeff = mesh.comm.gather(assemble_scalar(drag), root=0)
lift_coeff = mesh.comm.gather(assemble_scalar(lift), root=0)
p_front = None
if len(front_cells) > 0:
p_front = p_.eval(points[0], front_cells[:1])
p_front = mesh.comm.gather(p_front, root=0)
p_back = None
if len(back_cells) > 0:
p_back = p_.eval(points[1], back_cells[:1])
p_back = mesh.comm.gather(p_back, root=0)
if mesh.comm.rank == 0:
t_u[i] = t
t_p[i] = t - dt / 2
C_D[i] = sum(drag_coeff)
C_L[i] = sum(lift_coeff)
# Choose first pressure that is found from the different processors
for pressure in p_front:
if pressure is not None:
p_diff[i] = pressure[0]
break
for pressure in p_back:
if pressure is not None:
p_diff[i] -= pressure[0]
break
vtx_u.close()
vtx_p.close()
t=0
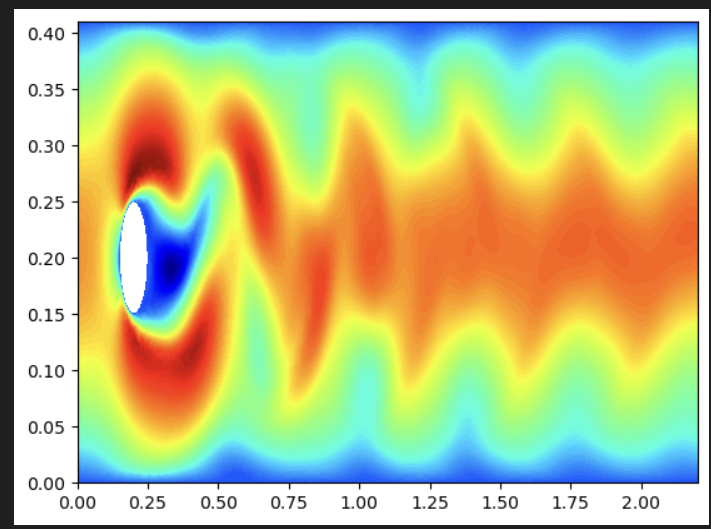
After I plot the solution values for different time frames the results are not logical.
the result of the velocity along x coordinates for last time frame is:

the actual result should be as:
Thanks.





